


Анализ и расчет характеристик среднеорбитальной системы типа: ГЛОНАС, NAV-STAR
Министерство транспорта РФ
Государственная морская академия им. С.О. Макарова
Кафедра РНП и С
Курсовое проектирование
на тему: Анализ и расчет характеристик среднеорбитальной системы типа: ГЛОНАС, NAV-STAR
Выполнил: К-т 441 гр.
Мамонов А.Р.
Проверил: преподаватель
Иванов Н.А
С – ПБ 2009г.
Оглавление
1. Параметры орбит и движения ИСЗ ССРНС
1.1 Расчет некоторых параметров круговой орбиты
1.2 Построение эскиза орбит и положения спутников
1.3 Параметры Кеплера для эллиптической орбиты
1.4 Заданные параметры положения четырех ИСЗ и судна
2. Основные параметры радиоканала ИСЗ-судно
2.1 Аппаратура и излучаемые сигналы ИСЗ
2.2 Принимаемые сигналы
2.3 Отношение сигнал/шум
2.4 Режим поиска принимаемых сигналов
2.5 Режим автоподстройки частоты (АПЧ)
3. Режим определения координат и времени
3.1 Модель и погрешности измерения временного положения огибающей
3.2 Алгоритм определения координат и поправки к шкале времени
3.3 Оценка влияния погрешностей измерений на определение x, y, z
4. Режим определения путевой скорости, путевого угла и поправки к частоте опорного генератора
4.1 Модель фазового измерителя секундных приращений дальности до ИСЗ
4.2 Определение секундных приращений координат
5. Режим определения истинного курса, крена, дифферента
5.1 Основные понятия пространственной угловой ориентации судна
5.2 Алгоритмы и погрешности определения истинного курса, крена и дифферента по сигналам 4-х ИСЗ
1. Параметры орбит и движения ИСЗ ССРНС
1.1 Расчет некоторых параметров круговой орбиты
Гравитационная постоянная Земли ![]() и заданное значение большой полуоси
и заданное значение большой полуоси ![]() =2.6560031*10^7 эллиптической орбиты в метрах определяют период обращения ИСЗ по орбите T в секундах (Т/3600 - в часах):
=2.6560031*10^7 эллиптической орбиты в метрах определяют период обращения ИСЗ по орбите T в секундах (Т/3600 - в часах):
![]() = 4.30778135*10^4.
= 4.30778135*10^4.
Из равенства центростремительного ускорения ![]() ускорению силы тяготения
ускорению силы тяготения ![]() легко получаются расчетные соотношения для основных параметров орбиты:
легко получаются расчетные соотношения для основных параметров орбиты:
![]() ;
;
линейная скорость
![]() .
.
Рассчитаем линейную скорость ИСЗ
![]() = 3.873956985*10^3.
= 3.873956985*10^3.
Максимальное расстояние прямой радиовидимости (между судном и ИСЗ вблизи линии горизонта) определяется по формуле
![]() =2.578457546*10^7 ,
=2.578457546*10^7 ,
где ![]() - радиус шаровой модели Земли
- радиус шаровой модели Земли ![]() .
.
Необходимо вывести эту формулу и рассчитать ![]() .
.
Показать, что прямая радиовидимость одного ИСЗ имеет место с точек земной поверхности, образующих шаровой сегмент, максимальная геоцентрическая угловая ширина которого равна
![]() =76.1208092
=76.1208092
Рассчитать максимальную продолжительность Т существования прямой радиовидимости между судном и ИСЗ
![]() = 5.0603673.
= 5.0603673.
1.2 Построение эскиза орбит и положения спутников
Эскиз соответствует картине расположения орбит, Земли и НИСЗ, видимой наблюдателем с "бесконечно" удаленной точки северного конца оси вращения Земли. Все НИСЗ и орбиты находятся на сфере радиуса а. На эскизе a=6-8см. Радиус Земли примерно в 4 раза меньше. Экваториальное сечение орбит и Земли - на рис.2. Нижний конец вертикальной прямой, проходящей через центр Земли пусть направлен на точку весеннего равноденствия (созвездие Овна). Нижняя точка пересечения этой вертикали и внешней окружности пусть представляет восходящий узел первой (нулевой) орбиты (тогда верхняя точка пересечения - нисходящий узел).
Для эскиза примем, что угол наклонения орбит (между плоскостью орбиты и экваториальной плоскостью) равен 60°; тогда все кратчайшие расстояния от точек орбиты до оси узлов при проектировании на экваториальную плоскость "сократятся" вдвое, поскольку cos(60°)=0.5.
Для определения проекции спутника, которому соответствует фаза u (угол между радиусами-векторами ИСЗ и восходящего угла), достаточно отложить с помощью транспортира этот угол на внешней окружности (в направлении движения ИСЗ) и из полученной точки опустить перпендикуляр на ось узлов; средняя точка этого перпендикуляра и есть искомая проекция. Задаваясь достаточным количеством точек, получим проекцию орбиты - эллипс, малая полуось которого вдвое меньше радиуса a круговой орбиты. В "Глонасс" и "Навстар" используется соответственно 3 и 6 орбит; угол между соседними восходящими углами соответственно 120° и 60°.
Внешняя окружность делится на шесть одинаковых частей (в "Навстар" имеет место совмещение пар осей узлов).
В учебных примерах примем, что в "Глонасс" 24 ИСЗ, в "Навстар" 18 ИСЗ, соответственно по 8 и 3 на орбите. Номер орбиты соответствует номеру восходящего узла, отмечаемого против часовой стрелки. Если номера ИСЗ обозначить через "м" (причем соответственно 1£м£24 и 1£м£18), то номер орбиты равен наибольшему целому числу в частном от деления м-1 на соответственно 8 и 3.
Угловой промежуток между ИСЗ одинаков - соответственно 45° и 120° эскиз строится на момент, когда фаза первого ИСЗ на первой орбите равна н×10. При переходе с орбиты на соседнюю орбиту вводится дополнительная фаза соответственно 15° и 40°.На орбите положение ИСЗ можно указать крупной точкой, от которой проводится стрелка, соответствующая направлению движения. Возле этих точек указывается номер ИСЗ; номер подчеркивается, если ИСЗ находится над экваториальной плоскостью.
1.3 Параметры Кеплера для эллиптической орбиты
Орбита навигационного ИСЗ делается близкой к круговой для обеспечения постоянства условий приема в любых географических районах, для уменьшения объема передаваемой с ИСЗ на судно специальной информации и для упрощения алгоритмов расчета положения ИСЗ на момент навигационных определений. В частности, уменьшается количество итераций при решении уравнения Кеплера, которое необходимо для определения угла (истинной аномалии) между радиусом-вектором ИСЗ относительно центра Земли) и точкой перигея эллиптической орбиты (рис.1). Расчет ведется в следующем порядке.
Рассчитывается заданный условный угол (средняя аномалия ![]() ), который получался бы при движении ИСЗ с постоянной угловой скоростью
), который получался бы при движении ИСЗ с постоянной угловой скоростью ![]() на некоторый момент времени, отсчитываемый с момента прохождения спутником точки перигея. Этот угол задан в градусах:
на некоторый момент времени, отсчитываемый с момента прохождения спутником точки перигея. Этот угол задан в градусах:
![]() = 50.
= 50.
Заданный эксцентриситет орбиты
![]() = 0.01.
= 0.01.
Определяется эксцентрическая аномалия Е из уравнения Кеплера
![]()
методом последовательных итераций по рекуррентной формуле, которая при исчислении углов в градусах имеет вид:
![]()
Ma = ![]() = 50
= 50
![]()
![]()
![]()
![]()
![]()
E<10^7
где M - номер шага, причем на первом (нулевом) шаге полагается, что ![]() . Привести последовательность значений
. Привести последовательность значений ![]() ; на последнем шаге обеспечить условие меньше 10-7.
; на последнем шаге обеспечить условие меньше 10-7.
Рассчитывается истинная аномалия
![]() =50,91070459.
=50,91070459.
Рассчитываются три разности между истинной, средней и эксцентрической аномалиями.
Примечание: Подробные сведения о закономерностях движения ИСЗ и передаваемой с ИСЗ на судно информации содержатся в (5,4) и в отдельном приложении к настоящим методическим указаниям.
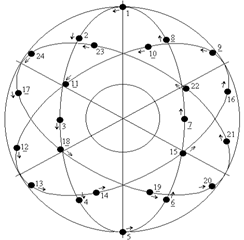
Рис.1. Эскиз расположения на орбитах «Глонас» (при н=10)
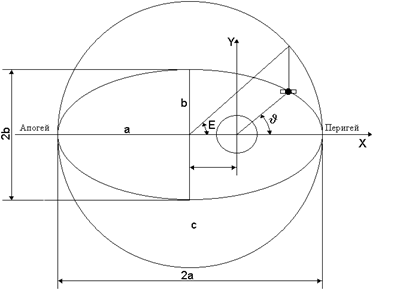
Рис.2. Параметры Кеплера (истинная и эксцентрическая аномалии ИСЗ) для плоской эллиптической орбитой
1.4 Заданные параметры положения четырех ИСЗ и судна
Напомним: правило индивидуализации вариантов работы приведено во введении.
Поскольку расстояния до ИСЗ имеют порядок десяти миллионов метров, а достижимые точности - порядка дециметров, то необходимо использовать (в п.1.4.1) все значащие цифры калькулятора после запятой.
Расчеты ведутся в горизонтной системе координат с началом в счислимой точке; орт х0 направлен на восток, орт у0 - на север, орт z0 - вверх.
Координаты xk, yk, zk спутников (k= 1,2,3,4) в метрах на момент навигационных измерений находятся по заданным
- углу ![]() возвышения (высоты места) ИСЗ между радиус-вектором ИСЗ
возвышения (высоты места) ИСЗ между радиус-вектором ИСЗ ![]() (направленным на ИСЗ с начала горизонтной системы) и плоскостью XOY в градусах:
(направленным на ИСЗ с начала горизонтной системы) и плоскостью XOY в градусах:
![]() ;
;
углу ![]() азимута ИСЗ - между проекцией
азимута ИСЗ - между проекцией ![]() на плоскость XOY и осью y1:
на плоскость XOY и осью y1:
![]() ; A4= 0
; A4= 0
модулю радиуса-вектора ИСЗ,
![]() (в метрах)
(в метрах)
R1=20000300 м
R2=20000500 м
R3=20000700 м
R4=20000900 м
По этим данным рассчитываются направляющие косинусы радиус-векторов:
![]() ;
; ![]() ;
; ![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
и координат спутников в метрах:
![]() ;
; ![]() ;
; ![]() .
.
X1 = 12667607.71Y1 = -7313646.719Z1 = 13640171.8
X2 =-12667734.38Y2 = -7313719.855Z2 = 13640308.2
X3 =0Y3 = -14627585.98Z3 = 13640444.6
X4 =0Y4 = 0.000000001224Z4 = 20000900
Параметры вектора линейной скорости спутников.
Модуль этого вектора рассчитан в п.1.3.1. Проекции вектора скорости ИСЗ рассчитываются по формулам (в м/с):
V=3873,968654
![]() ;
;
![]() ;
;
![]() .
.
Vx1 = 622, 03635783Vy1 = 1169, 880241Vz1 = 3640,328792
Vx2 = 1169, 045951Vy2 = 2198, 655659Vz2 = 2967, 623222
Vx3 = 1575, 051349Vy3 = 2962, 240755Vz3 = 1936, 978493
Vx4 = 1791, 082308Vy4 = 3368, 535899Vz4 = 672. 7055708
Координаты судовой приемной антенны в метрах:
![]() =1300;
=1300; ![]() .
.
Модуль вектора путевой скорости судна в м/с
![]() =11м/с.
=11м/с.
Проекции вектора путевой скорости в м/с
![]() =7, 926062228;
=7, 926062228;
![]() = 7.627420111;
= 7.627420111;
![]() .
.
Истинный курс И, дифферент D и крен К в градусах пусть равны
Ио= 35+н=45, ![]() =2;
=2; ![]() =-2.
=-2.
В работе используется одно из возможных определений указанных углов: истинный курс И равен углу между направленной на север осью ординат у и проекцией продольной оси судна на плоскость XOY; дифферент д угол между продольной осью судна и плоскостью XOY; крен К - угол между поперечной осью и плоскостью XOY.
![]()
![]()
![]()
![]()
2. Основные параметры радиоканала ИСЗ-судно
2.1 Аппаратура и излучаемые сигналы ИСЗ
Необходимо построить на основе материалов параграфа 13.3 (1) структурную упрощенную схему аппаратуры ИСЗ, изучить принцип ее работы и формирования излучаемых сигналов применительно к ССРНС "Навстар".
В структурной схеме должны быть блоки, позволяющие из колебаний высокостабильного генератора с частотой ![]() получить и излучить открытый для всех потребителей радиосигнал, который с точностью до постоянного множителя выражается произведением трех множителей:
получить и излучить открытый для всех потребителей радиосигнал, который с точностью до постоянного множителя выражается произведением трех множителей:
![]() ;
; ![]() ;
; ![]() .
.
здесь: t - время, отсчитываемое по шкале хранителя времени ИСЗ;
D(t) - дальномерный код (в пособиях обозначен C(t)), который играет роль огибающей навигационного сигнала и может рассматриваться как последовательность примыкающих друг к другу одинаковых по длительности ![]() элементарных видеоимпульсов, амплитуда которых принимает практически равновероятное значение ±1 - в соответствии с детерминированным сложным законом кода Голда, формируемого схемой, называемой "кодер" или "ГУН кода D(t)". Период кода D(t) равен
элементарных видеоимпульсов, амплитуда которых принимает практически равновероятное значение ±1 - в соответствии с детерминированным сложным законом кода Голда, формируемого схемой, называемой "кодер" или "ГУН кода D(t)". Период кода D(t) равен ![]() . Следует вспомнить смысл и схемы определения автокорреляционной функции кодов. Структурная схема аппаратуры ИСЗ должна включать и приемник (с приемной антенной) для сигналов земных информационно-передающих пунктов (ИПП) о параметрах орбит всех ИСЗ. Эта принятая на ИСЗ информация запоминается в ЭВМ и в переработанном виде передается с каждого ИСЗ потребителям, для чего и служит код, обозначаемый в аналитическом представлении изучаемого сигнала множителем С(t). Элементарная посылка (+1) этого кода имеет длительность
. Следует вспомнить смысл и схемы определения автокорреляционной функции кодов. Структурная схема аппаратуры ИСЗ должна включать и приемник (с приемной антенной) для сигналов земных информационно-передающих пунктов (ИПП) о параметрах орбит всех ИСЗ. Эта принятая на ИСЗ информация запоминается в ЭВМ и в переработанном виде передается с каждого ИСЗ потребителям, для чего и служит код, обозначаемый в аналитическом представлении изучаемого сигнала множителем С(t). Элементарная посылка (+1) этого кода имеет длительность ![]() , что обеспечивает скорость передачи 50бит/с. (В пособиях код С(t) обозначают D(t)).
, что обеспечивает скорость передачи 50бит/с. (В пособиях код С(t) обозначают D(t)).
Для упрощения записей можно там, где допустимо, множитель С(t) иногда опускать.
Средняя мощность изучения в направлении максимума диаграммы направленности передающей антенны ИСЗ круговой поляризации в Вт:
![]() (в Ваттах)=540Вт.
(в Ваттах)=540Вт.
Полагая, что все ИСЗ излучают одновременно в точках с координатами ![]() ,
, ![]() ,
, ![]() сигналы
сигналы ![]() , обнаружим, что после прохождения радиального расстояния
, обнаружим, что после прохождения радиального расстояния ![]() со скоростью света
со скоростью света ![]() приобретают запаздывания, равные
приобретают запаздывания, равные ![]() . Рассчитанные значения
. Рассчитанные значения
![]()
в метрах и ![]() в мкс. Принятые сигналы (пока без учета ослабления) можно записать в виде:
в мкс. Принятые сигналы (пока без учета ослабления) можно записать в виде:
![]() ;
;
Следует иметь ввиду. что начальная фаза фаза ![]() равна сумме целого числа
равна сумме целого числа ![]() циклов 2p и дробной части фазового цикла, которая только и может быть измерена. Рекомендуется (при наличии возможности использования ПЭВМ) оценить значения целой и дробной части полной фазы сигнала.
циклов 2p и дробной части фазового цикла, которая только и может быть измерена. Рекомендуется (при наличии возможности использования ПЭВМ) оценить значения целой и дробной части полной фазы сигнала.
Оценим доплеровские смещения F несущих частот принимаемых сигналов. Это смещение равно деленной на 2p производной начальной фазы![]() принятого сигнала, т.е. равно дроби, числитель которой равен взятой со знаком минус скорости vr изменения радиального расстояния rпк , а знаменатель равен длине волны, т.е. F=vr/l. Полагают, что это смещение на поверхности Землми по модулю не превышает 4500 Гц. Максимальное по модулю смещение Fmx может наблюдаться на неподвижной точке орбиты .вблизи ИСЗ. Здесь vr=-v при приближении ИСЗ и vr=+ при удалении ИСЗ. Следует рассчитать значение Fmx с учетом п.1.1.1.
принятого сигнала, т.е. равно дроби, числитель которой равен взятой со знаком минус скорости vr изменения радиального расстояния rпк , а знаменатель равен длине волны, т.е. F=vr/l. Полагают, что это смещение на поверхности Землми по модулю не превышает 4500 Гц. Максимальное по модулю смещение Fmx может наблюдаться на неподвижной точке орбиты .вблизи ИСЗ. Здесь vr=-v при приближении ИСЗ и vr=+ при удалении ИСЗ. Следует рассчитать значение Fmx с учетом п.1.1.1.
В параграфе 11.4 (1) показано, что отношение излучаемой мощности к принимаемой Р равно квадрату ![]() , то с учетом потерь в 2дБ в антенном кабеле получают расчетную мощность сигнала на выходе приемника в дБ на максимальном расстоянии
, то с учетом потерь в 2дБ в антенном кабеле получают расчетную мощность сигнала на выходе приемника в дБ на максимальном расстоянии ![]() из
из ![]()
![]() =-159.294120504.
=-159.294120504.
Спектральная плотность мощности шумов (в полосе 1Гц) на входе приемника выражается как ![]() , где k - постоянная Больцмана (-228.6дБВт/кГц), а эквивалентная шумовая температура равна 630К или 28дБ. Поэтому спектральная плотность шума (мощность спектральных составляющих в полосе 1Гц), выраженная в дБ, равна
, где k - постоянная Больцмана (-228.6дБВт/кГц), а эквивалентная шумовая температура равна 630К или 28дБ. Поэтому спектральная плотность шума (мощность спектральных составляющих в полосе 1Гц), выраженная в дБ, равна
![]() .
.
Таким образом, отношение спектральной плотности шума к мощности сигнала на входе приемного тракта следует рассчитать по формуле
![]() =-41.305879496.
=-41.305879496.
Переход от дБ к реальным отношениям осуществляется по известному соотношению ![]() , где
, где ![]() . Обратная величина, т.е.
. Обратная величина, т.е. ![]() , равна отношению сигнал/шум по мощности в полосе 1Гц; корень из этой величины определяет отношение с/ш по напряжению (току) в той же полосе.
, равна отношению сигнал/шум по мощности в полосе 1Гц; корень из этой величины определяет отношение с/ш по напряжению (току) в той же полосе.
![]() =-4.1305879496
=-4.1305879496
No/P(реальное отношение)=0.00007403
Обратная величина: P/No=1/No/P=13507.90351
Рассчитывается отношение с/ш во входной цепи приемника с полосой ![]() , т.е. в преселекторе, согласованном с элементарным радиоимпульсом длительностью
, т.е. в преселекторе, согласованном с элементарным радиоимпульсом длительностью ![]() :
:
 =0.08218243,
=0.08218243,
где П - в Гц, ![]() .
.
Рассчитывается с/ш после "снятия кода" в накопителе-усреднителе системы поиска с постоянной времени ![]() (в фильтре низких частот с полосой
(в фильтре низких частот с полосой ![]() на выходе фазового детектора или в полосовом фильтре УПЧ с полосой
на выходе фазового детектора или в полосовом фильтре УПЧ с полосой ![]() .
.
![]() =11.622350668.
=11.622350668.
2.4 Режим поиска принимаемых сигналов
Измерительные следящие системы за временным положением (задержкой) огибающей (ССЗ) и за фазой несущей (ССН) могут функционировать после завершения операций поиска псевдослучайного сигнала (т.е. после грубого совмещения принятого ![]() и опорного
и опорного ![]() кодов).. Необходимо детально изучить и воспроизвести схему поиска рис.13.2 (1), дополнив указанием, что опорное напряжение на входе нижнего ФД имеет вид
кодов).. Необходимо детально изучить и воспроизвести схему поиска рис.13.2 (1), дополнив указанием, что опорное напряжение на входе нижнего ФД имеет вид ![]() . Задаваясь
. Задаваясь ![]() и С=+1, следует построить примерный график зависимости видеонапряжения на выходе верхнего фильтра ФНЧ от интервала между начальными метками периодов сигнального и опорного кодов. Необходимо добиться четкого понимания (и уметь объяснить) почему этот график должен соответствовать функциям корреляции, определяемым по формулам на с.288 (1).
и С=+1, следует построить примерный график зависимости видеонапряжения на выходе верхнего фильтра ФНЧ от интервала между начальными метками периодов сигнального и опорного кодов. Необходимо добиться четкого понимания (и уметь объяснить) почему этот график должен соответствовать функциям корреляции, определяемым по формулам на с.288 (1).
2.5 Режим автоподстройки частоты (АПЧ)
После режима поиска до функционирования ССЗ и ССН работает схема АПЧ в соответствии со схемой рис.13.4(1), которую необходимо изучить. Доказать, что на ГУН несущей воздействует управляющий сигнал, указанный на схеме.
3. Режим определения координат и времени
3.1 Модель и погрешности измерения временного положения огибающей
Измеритель временного положения огибающей.
Схема рис.13.7 (1) дополняется двумя блоками: бортовым хранителем времени (БХВ), метки электронной шкалы времени которого служат опорными для измерителя временных интервалов (ИВИ). На второй вход ИВИ подаются метки начала периода с ГУН кода ![]() , который управляется на рис.13.7(1) напряжением, пропорциональным
, который управляется на рис.13.7(1) напряжением, пропорциональным ![]() до тех пор, пока величина
до тех пор, пока величина ![]() не будет близка нулю. Необходимо детально изучить и знать процессы в схеме рис.13.7(1) и иллюстрировать их временными диаграммами, подобными рис. 13.6 (1).
не будет близка нулю. Необходимо детально изучить и знать процессы в схеме рис.13.7(1) и иллюстрировать их временными диаграммами, подобными рис. 13.6 (1).
Если БХВ имеет уход шкалы времени ![]() , то ИВИ (при отсутствии других погрешностей) позволяет получить квазидальномерные отсчеты в единицах времени
, то ИВИ (при отсутствии других погрешностей) позволяет получить квазидальномерные отсчеты в единицах времени ![]() . С последующим (в п.3.2.1) переходом к линейным единицам.
. С последующим (в п.3.2.1) переходом к линейным единицам.
Шумовая погрешность
Методика оценки средней квадратической шумовой погрешности слежения за временным положением огибающей дана на с.32-45 (1). Для расчетов удобна формула из параграфа 42 (4), выражающая сразу погрешность оценки квазидальности по ССЗ в метрах
![]() =745.22065894
=745.22065894
Расчет следует выполнить при ![]() .
.
Другие источники погрешностей в ССРНС "ГЛОНАСС" по ССЗ (с.300 (4)):
- неточность прогноза координат и ухода шкалы времени - 4 м;
- возмущение орбит и немоделируемые уходы шкалы времени - 3 м;
- неточность прогноза времени распространения в тропосфере - 2 м;
- неточность прогноза времени распространения в ионосфере - 9 м;
- многолучевость распространения - 1,2 м;
- прочие источники - 1 м.
Результирующая погрешность находится как квадратный корень из суммы квадратов составляющих п. 3.1.2 и п. 3.1.3.
![]()
σrez’=11.622350668
В дифференциальных подсистемах ССРНС, за счет использования информации с контрольно-корректирующих пунктов исключается первая и четвертая из перечисленных в п. 3.1.3 составляющих.
Рекомендуется продумать как определить погрешность ![]() в значении средней концентрации N электронов в ионосфере вызывает указанную в п.3.1.3 четвертую (наиболее значимую) составляющая Dr=9м. Для этого необходимо воспользоваться приведенными на с.257 (1) соотношениями, из которых вытекает:
в значении средней концентрации N электронов в ионосфере вызывает указанную в п.3.1.3 четвертую (наиболее значимую) составляющая Dr=9м. Для этого необходимо воспользоваться приведенными на с.257 (1) соотношениями, из которых вытекает:
![]() ,
,
где ![]() ,
, ![]() .
.
![]() =0,253186813*1012
=0,253186813*1012
3.2 Алгоритм определения координат и поправки к шкале времени
Результаты измерений п.3.1.1 после умножения на скорость распространения радиоволн можно записать в виде:
![]() ,
,
где
![]() ,
, ![]()
Оценки искомых X, Y, Z, d могут быть найдены из системы нелинейных уравнений
![]() ,
,
k = 1, 2, 3, 4. Для упрощения расчетов в современной аппаратуре эта система линеаризуется за счет того, что истинные расстояния rпк при малых значениях X, Y, Z незначительно отличаются от счислимых: расстояний (от счислимой точки до ИСЗ) ![]() . При этом используется лишь линейная часть разложение величины rпк в ряд Тейлора. Учитывая, что частные производные от
. При этом используется лишь линейная часть разложение величины rпк в ряд Тейлора. Учитывая, что частные производные от ![]() по координатам судна равны (с обратным знаком) направляющим косинусам, значения которых имеются в табл.1, получим линейное приближение:
по координатам судна равны (с обратным знаком) направляющим косинусам, значения которых имеются в табл.1, получим линейное приближение:
![]() .
.
Обозначая разность между счислимым и измеренным расстояниями до ИСЗ через
![]()
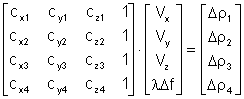
можно исходную нелинейную систему переписать в виде линейной системы уравнений:
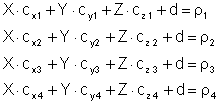
и в матричном виде
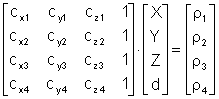 .
.
![]()
![]() =382.102162131
=382.102162131
![]() =-1.264662138*10^3
=-1.264662138*10^3
![]() =984.859730108
=984.859730108
![]() =50
=50
Детерминант следующей матрицы: ![]() =0.441912386
=0.441912386
Детерминант матрицы Х: ![]() X=574.486101176
X=574.486101176
Детерминант матрицы Y: ![]() Y=574.486101176
Y=574.486101176
Детерминант матрицы Z: ![]() Z=22.095619276
Z=22.095619276
Детерминант матрицы D:![]() D=-1.144799074*10^-13=-0.0000000000001144799
D=-1.144799074*10^-13=-0.0000000000001144799
Решение этих уравнений через главный ![]() и частные
и частные ![]() ,
, ![]() ,
, ![]() определители представим в виде линейной комбинации результатов измерений на коэффициенты
определители представим в виде линейной комбинации результатов измерений на коэффициенты ![]() ,
, ![]() ,
, ![]() ,
, ![]() равные отношению соответствующих алгебраических дополнений к
равные отношению соответствующих алгебраических дополнений к ![]() :
:
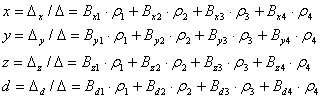
X=![]() =1300
=1300
Y=![]() =1300
=1300
Z=![]() =50
=50
D=![]() =-2.59055665844*10^-13
=-2.59055665844*10^-13
где, например,
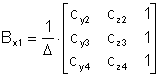 ;
; 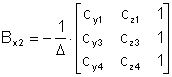 ; ... и т. д..
; ... и т. д..
Каждый исполнитель работы выполняет аналитические выкладки для получения выражений ![]() и B с использованием формулы п.1.4.1
и B с использованием формулы п.1.4.1
![]() ,
, ![]() ,.
,.
Необходимо доказать, что: главный определитель системы уравнений
![]() ,
,
и из шестнадцати коэффициентов В три равны нулю, а остальные равны одному из всего семи значений, так что:
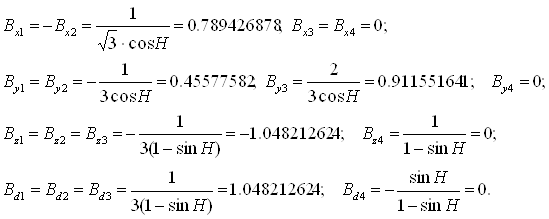
При расчете данных выражений использовались значения Н: Н1=Н2=Н3=43; Н4=90
Аналитические выкладки следует привести в приложении к отчету. При защите работы необходимо будет вывести выражение для одного из коэффициентов. Рассчитанные значения коэффициентов поместить в табл.3 с тремя знаками после запятой.
3.3 Оценка влияния погрешностей измерений на определение x, y, z
Понятие геометрического фактора (см. с.83 /1/) облегчает оценку точности системы в предположении одинаковости дисперсий ![]() и некоррелированности результатов измерений. Эти требования удовлетворяются из-за одинаковости условий приема сигналов различных ИСЗ.
и некоррелированности результатов измерений. Эти требования удовлетворяются из-за одинаковости условий приема сигналов различных ИСЗ.
При некоррелированности погрешностей измерений и одинаковости дисперсий (![]() ) применимо известное из теории вероятностей правило (см. с.326-327 (1)): дисперсия линейной комбинации равна произведению дисперсии
) применимо известное из теории вероятностей правило (см. с.326-327 (1)): дисперсия линейной комбинации равна произведению дисперсии ![]() на сумму квадратов коэффициентов. Применительно к решениям системы п.3.2.1 - это правило дает равенства:
на сумму квадратов коэффициентов. Применительно к решениям системы п.3.2.1 - это правило дает равенства:
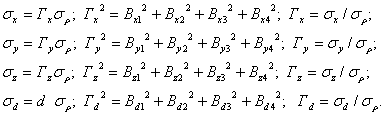
Величина Г и называется геометрическим фактором, зависящим лишь от взаимного геометрического расположения ИСЗ и судна.
Рассчитать геометрические факторы с двумя знаками после запятой
(![]() 1.11,
1.11, ![]() 1.11,
1.11, ![]() 1.81,
1.81, ![]() ).
).
Рассчитать геометрический фактор погрешности местоопределения на поверхности Земли ![]() и в пространстве
и в пространстве ![]() :
:
![]() =2.406039961,
=2.406039961, ![]() =1.578853755.
=1.578853755.
Рассчитывается погрешность местоопределения судна (на поверхности) в среднеорбитальной спутниковой РНС и по дифференциальной подсистеме - с учетом результатов п.3.1.3 - 3.1.4.
Данные расчета занести в табл.1.
Таблица 1
| Система | ССРНС | Навстар | Диф. ССРНС |
| sм (м) | 18,32 | 50,08 | 10,93 |
4. Режим определения путевой скорости, путевого угла и поправки к частоте опорного генератора
4.1 Модель фазового измерителя секундных приращений дальности до ИСЗ
Такой измеритель включает два верхних квадратурных канала рис.13.7 (1) и ГУН несущей, который состоит из высокостабильного неуправляемого опорного генератора ОГ и цифрового синтезатора частоты ЦСЧ, управляемого выходным сигналом схемы Костаса. ЦСЧ содержит регистр текущей разности фаз между колебаниями ОГ и принятого сигнала. Одному фазовому циклу соответствует равное длине волны приращение радиального расстояния от судна до ИСЗ. Из-за принципиальной многозначности фазовых измерений отсчет ЦСЧ в начальный момент времени t0 может отличаться от истинной величины измерявшегося в п.3.2.1 расстояния на неизвестное целое число длин волн. Поскольку это число сохранится во всех последующих отсчетах, то секундные изменения радиального расстояния, (как и приращения ![]() введенных в п.3.2.1 нормированных величин
введенных в п.3.2.1 нормированных величин ![]() ) будут определяться однозначно. Это позволяет по системе четырех линейных уравнений п.3.2.1 однозначно рассчитать и секундные приращения
) будут определяться однозначно. Это позволяет по системе четырех линейных уравнений п.3.2.1 однозначно рассчитать и секундные приращения![]() ,
, ![]() ,
, ![]() ,
, ![]() входящих в это уравнения X, Y, Z, d.
входящих в это уравнения X, Y, Z, d.
4.2 Определение секундных приращений координат
Они численно равны соответствующим проекциям вектора путевой скорости. А секундное приращение линейного эквивалента ухода шкалы времени в длинах волн равно разности между номиналами частот опорных генераторов ИСЗ и судна. Поэтому алгоритм определения перечисленных искомых величин сводится (после изменения обозначений по правилу: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ) к решению системы линейных уравнений п.3.1 в виде
) к решению системы линейных уравнений п.3.1 в виде
 .
.
Все полученные выше в п.3 аналитические выражения и численные значения для решения системы и геометрических факторов применимы и здесь с учетом изменения обозначений. В частности, погрешность оценки горизонтальной проекции
![]()
вектора путевой скорости и ухода частоты должны выражаться как
![]() ,
, ![]() .
.
Среднеквадратическая шумовая погрешность определения секундных приращений дальности ![]() в
в ![]() больше погрешности фазовых квазидальномерных отсчетов и выражается формулой
больше погрешности фазовых квазидальномерных отсчетов и выражается формулой
sDr »0,043(ПССН(N0/Р))0,5 =0.152 (в м/с). (4.3)
Пссн=10
No/P=0.00007403 см.п. 2.3
Результаты расчетов, задаваясь П=10Гц, привести в таблице 2.
Таблица 2.
| Величина |
|
|
| |
| Значение | 0,00116 | 0,1023520 | 0.000058697 | |
При расчете использовались значения ![]() см.п.2.1,
см.п.2.1,
Vx= 7.583626043 м/с; Vy= 8.511675278 м/с; см. п. 1.4.5
Путевой угол ПУ=arctg(Vx/Vy)- это угол между проекцией Vxy вектора V на горизонтальную плоскость Погрешность оценки путевого угла приближенно выражается формулой
![]() .
.
5. Режим определения истинного курса, крена, дифферента
5.1 Основные понятия пространственной угловой ориентации судна
Ориентация судна это ориентация судовой системы координат относительно неподвижной (пусть – горизонтной) системы координат x,y,z с базисными ортами xо, yо, zо. Вектора (и орты) обозначаются жирным курсивом. Судовая ортогональная система координат фиксируется на каждом судне в процессе строительства и сдаточных испытаний, причем горизонтальная, продольная и поперечная плоскости пересекаются по поперечной, продольной и вертикальной осям. Начальная точка отсчета – точка пересечения осей. Ось абсцисс хП с ортом a и ось ординат уП с ортом b совпадают соответственно с по перечной и продольной осями судна. Орт оси аппликат zП равен a´b и перпендикулярен ортам a и b.
Проекции любого орта е на оси x,y,z координат равны их направляющим косинусам НК (углов между ортом и осями): Прхе=сх, Пруе=су, Прzе=сz. Если проекции этого орта отложить от начала координат и построить прямоугольный параллелепипед, то исходящая из начала координат диагональ такого параллелепипеда и представляет рассматриваемый орт е=x0cx+y0сy+z0cz причем сх2+су2+сz2=1. Это равенство указывает, что вся информация о пространственной угловой ориентации орта любой оси содержится в трех НК. А полная информация об ориентации судна (т.е. о трех осях подвижной системы координат) содержится в матрице из девяти НК; причем равенство нулю скалярных произведений ортов(см./13/,п.14.10-1b) позволяет всегда указать на три НК, через которые выражают и остальные шесть.
Орты продольной и поперечной осей судна далее будут представляться как
b=x0cbx+y0 сby+z0cbz, a=x0cax + y0 cay + z0c az , ( 5.1 )
позволяя дать четкие количественные формулировки для указанных в п.1.4.5. трех параметров угловой ориентации судна:
дифферент Д это угол между ортом b продольной оси уП судна и плоскостью х0у,
2) крен К – угол между ортом а поперечной оси хП и плоскостью х0у,
3) истинный курс И это угол между направленной на север осью ординат у и проекцией орта b продольной оси уП судна на плоскость х0у.
Из прямоугольного параллелепипеда, соответствующего первому равенству (5.1) вытекают компактные соотношения для НК орта продольной оси
cbх=Прxb=cosДsinИ, сby=Пруb =cosДcosИ, сbz=Прzb =sinД.
Лишь один НК орта а выражается компактно: саz=cos(90о-К)=sinК. Далее ограничимся использованием полученных выше компактных выражений четырех НК: они достаточны для определения используемых угловых параметров
И=arctg(сbх/сby), Д=arcsinсbz, К=arcsinсаz . ( 5.2 )
Следует иметь ввиду, что обсуждаемые выше параметры относятся к одномоментному состоянию судна (относящемуся к одному моменту времени) без какой либо привязки с «предисторией» или прогнозом динамического процесса изменения ориентации судна во времени. На практике могут использоваться и другие методы и параметры описания угловой ориентации.
5.2 Алгоритмы и погрешности определения истинного курса, крена и дифферента по сигналам 4-х ИСЗ
Ограничимся рассмотрением случая 4-х ИСЗ, когда k=1.2.3.4 и систему линейных уравнений (5.2) можно представить с помощью апробированных в разделах .3 и 4 матриц
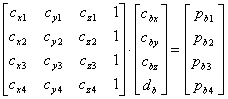 ;
;  . ( 5.3 )
. ( 5.3 )
Необходимые нам направляющие косинусы определяются по формулам раздела.3 (с соответствующей заменой обозначений) .
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
Средние квадратические погрешности определения направляющих косинусов при одинаковых СКП sp величин pak и pbk нормированных разностей расстояний выражаются аналогично (3.6):
![]() ; ( 5.4 )
; ( 5.4 )
![]() . ( 5.5 )
. ( 5.5 )
![]() . ( 5.6 )
. ( 5.6 )
Связь погрешности истинного курса DИ, дифферента DД и крена DК (в радианах) с погрешностями направляющих косинусов вытекает, если взять дифференциал соответствующего равенства из (5.1) или (5.2) и заменить знак дифференциала на приращение. Получаем:
DК=Dсaz/cosK, DД=Dcbz/cosД.
Такая же взаимосвязь сохранится и для среднеквадратических погрешностей СКО, т.е.
sК=scaz/cosK, sД=sсbz/cosД,
что с учетом (5.4) позволяет получить расчетные соотношения
sК=spГz/cosK=0.82505, sД=spГz/cosД=0.80505 ( 5.7)
Формулу для оценки погрешностей истинного курса получим, приведя дифференциал истинного курса И=arctg(сbх/сby) к приближению DИ @ сbyDсbх-сbxDсby. Поэтому СКО погрешности с учетом (5.5), (5.6) и (3.7) можно выразить как
sИ=spГм=0.1418 град, где